React
React uses a custom JavaScript Syntax Extension (JSX) to describe HTML elements and TypeScript for static typing, both of which require a transpiler to convert the code to JavaScript. To …
Technical sharing by programmers

React uses a custom JavaScript Syntax Extension (JSX) to describe HTML elements and TypeScript for static typing, both of which require a transpiler to convert the code to JavaScript. To …

目前有三個ts檔案,分別為custom.d.ts, routes.ts, index.ts 當各別下tsc custom.d.ts, tsc routes.ts, tsc index.ts, 與在資料夾的根目錄下npx tsc的結果不一樣。當各別下時,需在routes.ts的開頭加入/// ,且當下tsc index.ts時會出現錯誤:index.ts:2:8 – error TS1259: Module ‘”/mnt/c/cmder/Project/Book/Node.js/sample-express/node_modules/@types/express/index”‘ can only be default-imported using the ‘esModuleInterop’ flag 2 import express, { …
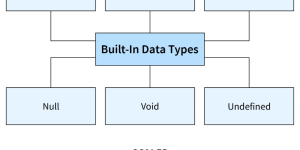
Primitive JavaScript Types The union Type The array Type The tuple Type The any Type The void Type The object Type Custom Types and interface
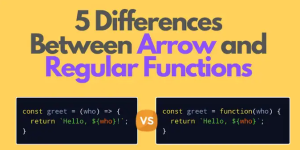
分析 traditional() 方 理解 this 綁定 等價於: javascript複製編輯console.log(scopeOf.traditional()); // 相當於 scopeOf.traditional.call(scopeOf); 因此: javascript複製編輯this === scopeOf; // ✅ this 綁定到 scopeOf this.scope === “defining scope”; // ✅ 回傳 “defining scope” 分析 …
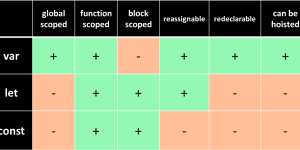
var function scope const let block scope

Node.js is a JavaScript runtime environment. First, Install the Node.js in your computer system. Windows: Linux: use nvm to manage the different node version The default package manager for Node.js …
openssl genpkey -algorithm RSA -out private.pem openssl req -new -key private.pem -out mydomain.csr openssl x509 -req -days 365 -in mydomain.csr -signkey private.pem -out certificate.pem 最終得到的private.pem與certificate.pem

npm serch express var, let, const

首先安裝 NVM (Node Version Manager),由它安裝及管理Node的開發環境版本。 使用npm init -y 建立一個node的專案 使用npm install express, request –save安裝此次所使用到的express.js與request Package. 建立server.js文件 修改package.json 使用npm start運行程式server.js 使用postman進行測試