JavaScript: Tagged template literals
In ES6 and later, strings literals can be delimited with backticks, everything between the ${ and the matching } is interpreted as a JavaScript expression. Everything outside the curly brace …
Technical sharing by programmers
In ES6 and later, strings literals can be delimited with backticks, everything between the ${ and the matching } is interpreted as a JavaScript expression. Everything outside the curly brace …

Not-a-number, NaN Binary floating-point numbers (IEEE-754) ✅ Solution: Use Number.EPSILON for Comparison BigInt BigInt is a special data type in JavaScript used to store and manipulate large integers beyond the …
☺ Whitespace & Line Breaks JavaScript ignores extra spaces, tabs, and new lines. Code is easier to read with proper indentation. ☺ Unicode You can use Unicode characters as variable …

Javascript not only a script language, it is a efficient general-purpose language suitable for software engineering and projects with huge codebases. JavaScript was invented by Brendan Eich in 1995. It was developed for Netscape …

架設方式∶搭配單軸移動平台,透過Encoder送出觸發訊號給感測控制器,最多一次可以量測65000個數據。 資料輸出為一個2維矩陣的數據資料。 以15999 x 3200 資料為例 功能∶ 資料取樣, (10×10) Block 為例 以2維矩陣數據,數據大小 (15999, 3200) => (1500, 320) 為例。因為資料源透過取樣平均,來加速邏輯運算的處理速度。 功能∶ 過濾數據,Height > 1.5 為例 Height > 1 Height > 1.5 Height …

🔹 Next.js 14 官方建議的方式 你可以在 src/app/sitemap.ts中,手動定義你的 sitemap 內容。 📌 1️⃣ 建立 sitemap.ts 在 src/app/sitemap.ts新增: ts複製編輯import { MetadataRoute } from ‘next’ export default function sitemap(): MetadataRoute.Sitemap { const baseUrl = ‘https://www.winerva.com’ …
Make sure you next.config.js content To Build Next.js Source Code and Start for check Copy deploy files to remote server unzip deploy fiels to /var/www/next-app and use pm2 to run …
🔍common device resolutions Prefix Min Width CSS sm 40rem (640px) @media (width >= 40rem) { … } md 48rem (768px) @media (width >= 48rem) { … } lg 64rem (1024px) @media (width >= …
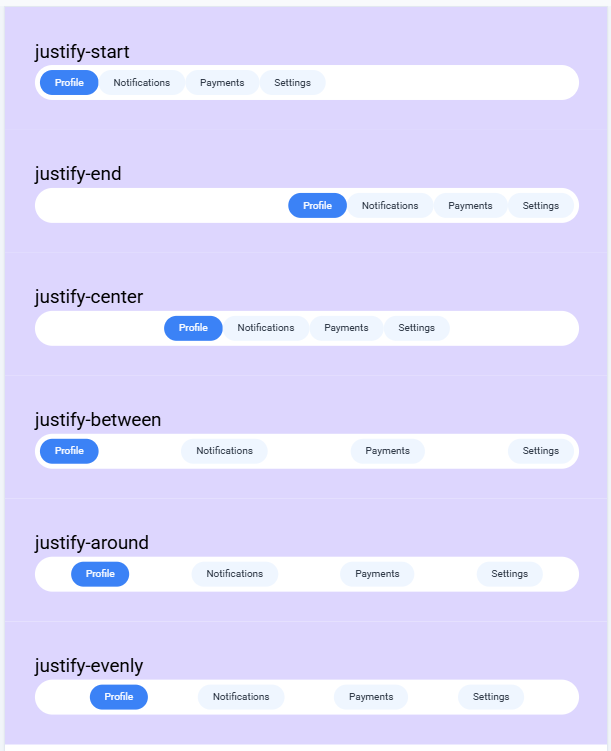
block-level elements:<div>, <p>, <h1>-<h6>, <section>, <article> inline-level elements:<span>, <a>, <strong>, <em> block-level elements: one below other block-level elements (default) <div> <div class=”quote”>…</div> <div class=”quote”>…</div> <div class=”quote”>…</div> </div> <div class=”flex”> <div …
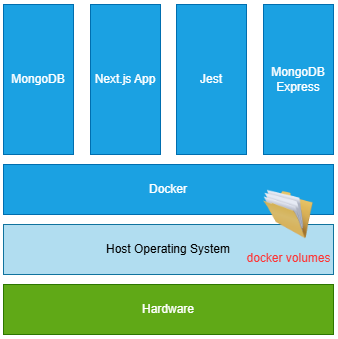
The docker-compose.yml file contains the MongoDB database, the MongoDB database client management tool, the Jest unit test, and the Next.js program host for this fullstack development. We develop in the …