Scipy常態分佈(normal distribution)
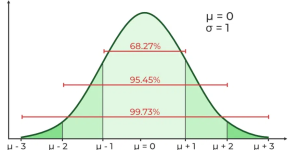
在SciPy的stats模塊中,norm代表正態分佈,也被稱為高斯分佈。正態分佈是一種連續概率分佈,其在平均值周圍對稱。 SciPy中的norm對象表示具有指定均值(loc)和標準差(scale)的正態分佈。它提供了各種方法來處理正態分佈,例如計算概率密度函數(PDF)、累積分佈函數(CDF)、生成隨機樣本等。 在提供的代碼中,norm用於創建一個具有均值(loc)為0和標準差(scale)為1的正態分佈對象。然後,使用這個分佈對象(dist)計算PDF、CDF,並從正態分佈生成隨機樣本。 在這個例子中,pdf 和 cdf 是根據模型預測的值,而 sample 是隨機模擬出的值,用於檢驗模型與實際數據的符合程度。 PDF 與 sample的分佈是一致。CDF(累積分佈函數)代表的是在某個數值之前的累積概率。對於正態分佈來說,當 x 值由-5往0時越接近平均值,累積概率越接近 0.5,這是因為正態分佈是對稱的, CDF在 x > 0 的區間,CDF 的值持續上升,而是趨於 1。這種情況下,如果模型的預測與實際數據相符,並且實際數據的分佈也表現出在這個區間的數值較大的趨勢,那麼可以認為模型是比較正確的