密度聚類算法(DBSCAN)
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一種密度聚類算法,用於將數據點劃分為多個集群,同時可以識別和排除噪音點。該算法基於以下概念: DBSCAN算法運行步驟如下: DBSCAN的主要優勢是: 總的來說,DBSCAN是一種強大的聚類算法,特別適用於處理具有不同密度和形狀的數據集。
Technical sharing by programmers

DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一種密度聚類算法,用於將數據點劃分為多個集群,同時可以識別和排除噪音點。該算法基於以下概念: DBSCAN算法運行步驟如下: DBSCAN的主要優勢是: 總的來說,DBSCAN是一種強大的聚類算法,特別適用於處理具有不同密度和形狀的數據集。
在影像科學中的一個常見應用是將圖像組件從彼此分割開來,這稱為閾值化。傳統的閾值化技術在圖像的背景是平坦的情況下效果很好。不幸的是,這種情況並不常見;相反,圖像中的背景在視覺上會在整個圖像中發生變化。因此,人們開發了自適應閾值化技術,我們可以很容易地在 scikit-image 中使用它們。
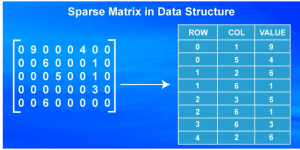
稀疏矩陣相對於密集矩陣在處理大多數元素為零的大型數組時的效率。稀疏矩陣僅存儲非零元素及其位置,導致在某些操作中記憶體使用量和計算時間大幅減少。
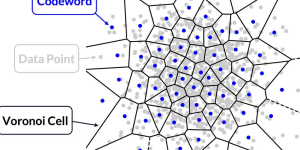
向量量化是一個通用術語,可以與信號處理、數據壓縮和聚類相關聯。在這裡,我們將專注於聚類組件,從如何將數據提供給vq包以識別聚類開始。
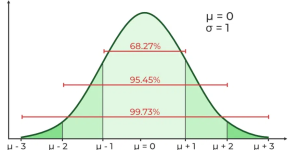
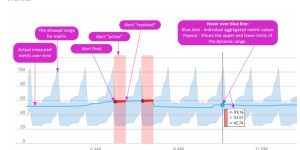
在SciPy的stats模塊中,norm代表正態分佈,也被稱為高斯分佈。正態分佈是一種連續概率分佈,其在平均值周圍對稱。 SciPy中的norm對象表示具有指定均值(loc)和標準差(scale)的正態分佈。它提供了各種方法來處理正態分佈,例如計算概率密度函數(PDF)、累積分佈函數(CDF)、生成隨機樣本等。 在提供的代碼中,norm用於創建一個具有均值(loc)為0和標準差(scale)為1的正態分佈對象。然後,使用這個分佈對象(dist)計算PDF、CDF,並從正態分佈生成隨機樣本。 在這個例子中,pdf 和 cdf 是根據模型預測的值,而 sample 是隨機模擬出的值,用於檢驗模型與實際數據的符合程度。 PDF 與 sample的分佈是一致。CDF(累積分佈函數)代表的是在某個數值之前的累積概率。對於正態分佈來說,當 x 值由-5往0時越接近平均值,累積概率越接近 0.5,這是因為正態分佈是對稱的, CDF在 x > 0 的區間,CDF 的值持續上升,而是趨於 1。這種情況下,如果模型的預測與實際數據相符,並且實際數據的分佈也表現出在這個區間的數值較大的趨勢,那麼可以認為模型是比較正確的
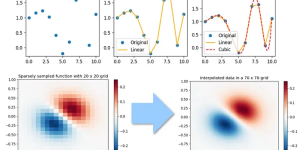
內插法是一種數學方法,用於在已知數據點之間估算未知點的值。在內插中,我們假設數據點之間的關係是連續且光滑的,並使用這種關係來預測未知位置的數值。 具體來說,當我們有一組離散的數據點,但我們想要在這些點之間的某個位置獲得更多的數據時,我們就可以使用內插法。它通常用於曲線擬合和數據補充的情況下,幫助我們理解數據的行為、預測趨勢或填補缺失的數據。 在內插中,我們根據已知的數據點來建立一個函數或曲線,該函數或曲線在這些點上通過已知的數據點,並且在這些點之間是連續且光滑的。然後,我們使用這個函數或曲線來估算我們感興趣的位置的值。 內插法有很多種類,包括線性內插、多項式內插、樣條內插等。選擇適當的內插方法取決於數據的特性和應用的需求 SciPy提供了十幾種不同的插值函數,從簡單的單變量情況到複雜的多變量情況。當樣本數據可能由一個獨立變量引導時,使用單變量插值,而多變量插值則假設存在多個獨立變量。 內插法有兩種基本方法:(1)對整個數據集擬合一個函數或(2)用多個函數擬合數據集的不同部分,其中每個函數的連接部分平滑地連接在一起。 我們接下來使用一個複雜的邏輯來產生數據,再使用Scipy的內插(擬合)函式來找出合適的資料模型函式。

使用多光譜影像處理或多光譜成像技術。它是一種利用不同波長的光(通常是可見光和近紅外光)來拍攝影像的技術。通過拍攝多個波長的影像,可以獲得不同光譜的信息,從而提供更多的資訊來分析和理解影像中的物體。 使用了三種不同顏色及不同的角度(紅光、綠光、藍光)的光來照射工件,並使用黑白相機分別拍攝了這三種光照下的影像。然後將這三張黑白照片組合成RGB彩色影像。在這個過程中,由於工件上的凸起部分對不同波長的光反射的方式不同,因此在RGB彩色影像中會出現顏色的變化。 多光譜成像技術可應用於許多領域,包括農業、環境監測、醫學影像、地質勘探等,以提供更多的資訊和更全面的分析。 使用案例: 檢測PCB板上的插件 R G B R, G, B Merge RGB Post Process 後處理後的影像,可以很清楚的辨識插件是否有正確的組裝。

客戶需求:希望視覺檢測系統可以將PCB板上的插件位置進行檢測,判斷該插件的位置是否有組裝? 透過利用2D相片的明顯特徵來辨識是否有插件,是一種常見的工業視覺應用。在這種情況下,我們依賴於圖像中的輪廓、顏色、紋理等特徵來檢測和識別插件的存在。這種方法基於計算機視覺領域的圖像處理技術和模式識別算法,例如邊緣檢測、特徵提取、模板匹配等,以實現對目標物體的自動檢測和識別。 而當需要獲取插件位置的高度信息時,我們可以採用3D掃描技術。3D掃描器可以利用光學或激光等方法對物體進行掃描,從而獲取其三維形狀和表面信息。通過對掃描得到的數據進行處理和分析,可以準確地確定插件的位置和高度信息。這種技術在工業自動化和質量控制等領域具有重要應用,為生產過程提供了精確的位置信息。 此外,Depth from Focus(DFF)技術以及多光譜成像技術也可以用於獲取插件位置的高度信息。Depth from Focus技術利用圖像中不同區域的焦點位置信息來推斷物體的深度,從而實現對插件位置的高度測量。而多光譜成像技術則利用不同波長的光對物體進行成像,通過分析不同波長光照射下的圖像特徵,可以獲取插件位置的高度信息。 綜上所述,通過結合2D相片的明顯特徵識別插件的存在,以及利用3D掃描技術、Depth from Focus技術和多光譜成像技術獲取插件位置的高度信息,可以實現對插件的準確檢測和位置測量,從而為工業生產和質量管理提供可靠的支持。 首我們使用結構相似性指數(SSIM)是一種用於評估兩幅2D圖像之間相似度的指標,它不僅考慮了亮度的相似性,還考慮了對比度和結構的相似性。SSIM是一種全局性指標,它通常被認為比傳統的均方誤差(MSE)和峰值信噪比(PSNR)更能準確地反映人類主觀感知。 SSIM的理論背景可以通過以下三個關鍵概念來解釋: 綜合以上三個方面,SSIM結合了亮度、對比度和結構的相似性來計算兩幅圖像之間的相似度。SSIM的範圍是從-1到1,其中1表示完美相似性,0表示無相似性,-1表示完全不相似。因此,較高的SSIM值意味著兩幅圖像越相似。 2D實驗影像1: SSIM = 0.40 2D實驗影像2: SSIM = 0.46 接下來我們將Depth from Focus(DFF)是一項用於從圖像中獲取深度信息的技術來進行實驗。它基於光學焦點原理,利用圖像中不同部分的清晰度來推斷物體的深度信息。以下是有關Depth from Focus的基本概念: 焦點原理:在光學中,焦點是光線匯聚的點,是圖像的清晰部分。當物體與鏡頭的距離不同時,其在圖像中的焦點位置也會不同。 Depth from …

客戶需求:使用者會將PDF中的標籤內容印刷到白色的織布上,希望透過視覺檢測可以將印刷不良的情況偵測出來。 我們將計劃使用局部可變形模型來進行標籤內容在織布上的視覺檢測,提供更精細的測試。 局部可變形模型是一種用於視覺檢測的技術,它可以在圖像中尋找局部特定形狀的實例。這種模型具有一定的靈活性,可以應對目標物體在圖像中的變形、旋轉和縮放等情況。 以下是局部可變形模型的一些重要特點和工作原理: 實驗一 我們故意將這張影像上幾處位置,故以把黑色的區域塗白。我們使用了上述的技術將缺瑕檢測出來。 原圖 檢出差異處 缺瑕圖 原圖 檢出差異處 QRCode塗白