鐵條計數
鐵條計數 傳統影像處理 較佳的影像呈現效果 較差的影像呈現效果 使用面掃描的相機取像的問題 必需使用線掃描的影像處理才能得到最佳影像 理想的影像 分析後得到數量39 電腦視覺軟硬體架構 NO 品項 預估金額 1 工業電腦 2 線掃描相機 3 線掃描相機鏡頭 4 線掃描光源 5 線掃描光源控制器 6 AOI軟體
Technical sharing by programmers
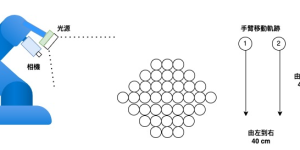
鐵條計數 傳統影像處理 較佳的影像呈現效果 較差的影像呈現效果 使用面掃描的相機取像的問題 必需使用線掃描的影像處理才能得到最佳影像 理想的影像 分析後得到數量39 電腦視覺軟硬體架構 NO 品項 預估金額 1 工業電腦 2 線掃描相機 3 線掃描相機鏡頭 4 線掃描光源 5 線掃描光源控制器 6 AOI軟體

紙張尺寸量測 方案一 A4 紙張 寬x高 210mm x 297mm 使用「校正塊」,校正塊的直徑為31mm 使用工業相機拍攝校正塊 使用AOI程式檢測校正塊 校正塊寬度為248像素 計算「像素 VS 實際尺寸」轉換比例 31 mm / 248 = 0.125 mm 使用工業相機拍A4紙張 使用AOI程式量測A4紙張 A4紙張量測寬度為1680.06像素 AOI量測像素 X 轉換比例 = 實際尺寸 …

客戶需求:使用者會將PDF中的標籤內容印刷到白色的織布上,希望透過視覺檢測可以將印刷不良的情況偵測出來。 我們將計劃使用局部可變形模型來進行標籤內容在織布上的視覺檢測,提供更精細的測試。 局部可變形模型是一種用於視覺檢測的技術,它可以在圖像中尋找局部特定形狀的實例。這種模型具有一定的靈活性,可以應對目標物體在圖像中的變形、旋轉和縮放等情況。 以下是局部可變形模型的一些重要特點和工作原理: 實驗一 我們故意將這張影像上幾處位置,故以把黑色的區域塗白。看看是否可以將差異處檢測出來? 可以看到左像影像比對出來異常的位置。這幾處位置是塗白的位置。 實驗二 可以看到QRCode被圖白的區域也有偵測出來。 AOI程式比對結果 比對原始資料一 比對原始資料二 比對原始資料三

客戶需求∶ 我需要檢測車燈的打出來的光的顏色組成,如果超出範圍則發出警示。 檢測手法∶ 色相直方圖分佈∶ 影像的色相直方圖分佈是描述影像中不同色相值的統計分佈情況。在色相直方圖中,色相值通常被劃分成若干個區間,例如0到180度之間的若干個小區間。然後,統計圖像中每個區間內像素的數量或者像素的比例,形成一個直方圖。 色相直方圖可以反映出圖像中各個色相的分布情況,即哪些色相在圖像中佔據主導地位,哪些色相較少出現。通過觀察色相直方圖,可以直觀地了解圖像的整體顏色分布情況,以及圖像中具體顏色的特徵。 通常,色相直方圖是基於圖像的色彩空間進行計算的,例如RGB色彩空間或者HSV色彩空間。在HSV色彩空間中,色相(Hue)表示顏色的種類或者色調,因此色相直方圖反映了圖像中不同種類顏色的分布情況。 通過比較不同圖像的色相直方圖分佈,我們可以評估它們之間的顏色相似度或者差異度,從而用於圖像檢索、圖像分類、圖像匹配等領域。 歸一相似度∶ “歸一相似度”(Normalized Similarity)指的是將相似度值歸一化到特定的範圍內,通常是0到1之間。這樣做的目的是使得相似度值更易於理解和比較,不受圖像尺寸、亮度等因素的影響。 在計算兩個直方圖的相似度時,我們可以得到一個原始的相似度值,表示它們之間的相似程度。但是這個值的範圍通常不是固定的,並且可能受到直方圖的大小、圖像的亮度等因素的影響。因此,將這個相似度值歸一化到0到1之間可以消除這些影響,使得相似度更具有可比性。 在歸一化相似度中,常見的做法是使用以下公式: 歸一化相似度=原始相似度直方圖1的總和+直方圖2的總和−原始相似度 歸一化相似度= 直方圖1的總和+直方圖2的總和−原始相似度 原始相似度 這樣得到的歸一化相似度值會保證在0到1之間,其中1表示完全相同,0表示完全不同。 合格 相似度:0.987 偏紅 相似度:0.552 偏黃 相似度:0.231 偏綠 相似度:0.318 偏藍 相似度:0.239
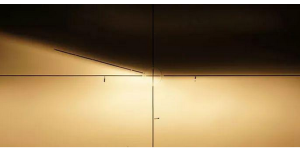
右駕光型量測規範示意 左駕光型量測規範示意 車燈配光室 AOI 輔助車燈燈型量測架設示意圖 使用 High Dynamic Range (HDR) Imaging 技術可以有效解決影像過曝所造成的影像失真問題,並得到一個明暗對比清晰的影像。這可以通過以下步驟實現: AOI 視覺分析 透過HDR技術取得 Tonemap HDR image 及相機反應函數 得到的Tonemap HDR Image, 用於光形的分析,可以得到下列數值 Golden 光型 中心點、輪廓、角度 亮度分佈 測試品 光型 中心點、輪廓、角度 …
首先,使用make_regression函數生成了一些合成數據,然後將數據分成訓練集和測試集。接著創建了LinearRegression模型的實例,並使用訓練集對模型進行訓練。訓練完成後,打印出了模型的係數和對新數據的預測結果。最後,通過可視化將訓練集和測試集的散點圖以及線性回歸的平面呈現出來。

DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一種密度聚類算法,用於將數據點劃分為多個集群,同時可以識別和排除噪音點。該算法基於以下概念: DBSCAN算法運行步驟如下: DBSCAN的主要優勢是: 總的來說,DBSCAN是一種強大的聚類算法,特別適用於處理具有不同密度和形狀的數據集。
在影像科學中的一個常見應用是將圖像組件從彼此分割開來,這稱為閾值化。傳統的閾值化技術在圖像的背景是平坦的情況下效果很好。不幸的是,這種情況並不常見;相反,圖像中的背景在視覺上會在整個圖像中發生變化。因此,人們開發了自適應閾值化技術,我們可以很容易地在 scikit-image 中使用它們。

使用多光譜影像處理或多光譜成像技術。它是一種利用不同波長的光(通常是可見光和近紅外光)來拍攝影像的技術。通過拍攝多個波長的影像,可以獲得不同光譜的信息,從而提供更多的資訊來分析和理解影像中的物體。 使用了三種不同顏色及不同的角度(紅光、綠光、藍光)的光來照射工件,並使用黑白相機分別拍攝了這三種光照下的影像。然後將這三張黑白照片組合成RGB彩色影像。在這個過程中,由於工件上的凸起部分對不同波長的光反射的方式不同,因此在RGB彩色影像中會出現顏色的變化。 多光譜成像技術可應用於許多領域,包括農業、環境監測、醫學影像、地質勘探等,以提供更多的資訊和更全面的分析。 使用案例: 檢測PCB板上的插件 R G B R, G, B Merge RGB Post Process 後處理後的影像,可以很清楚的辨識插件是否有正確的組裝。

客戶需求:希望視覺檢測系統可以將PCB板上的插件位置進行檢測,判斷該插件的位置是否有組裝? 透過利用2D相片的明顯特徵來辨識是否有插件,是一種常見的工業視覺應用。在這種情況下,我們依賴於圖像中的輪廓、顏色、紋理等特徵來檢測和識別插件的存在。這種方法基於計算機視覺領域的圖像處理技術和模式識別算法,例如邊緣檢測、特徵提取、模板匹配等,以實現對目標物體的自動檢測和識別。 而當需要獲取插件位置的高度信息時,我們可以採用3D掃描技術。3D掃描器可以利用光學或激光等方法對物體進行掃描,從而獲取其三維形狀和表面信息。通過對掃描得到的數據進行處理和分析,可以準確地確定插件的位置和高度信息。這種技術在工業自動化和質量控制等領域具有重要應用,為生產過程提供了精確的位置信息。 此外,Depth from Focus(DFF)技術以及多光譜成像技術也可以用於獲取插件位置的高度信息。Depth from Focus技術利用圖像中不同區域的焦點位置信息來推斷物體的深度,從而實現對插件位置的高度測量。而多光譜成像技術則利用不同波長的光對物體進行成像,通過分析不同波長光照射下的圖像特徵,可以獲取插件位置的高度信息。 綜上所述,通過結合2D相片的明顯特徵識別插件的存在,以及利用3D掃描技術、Depth from Focus技術和多光譜成像技術獲取插件位置的高度信息,可以實現對插件的準確檢測和位置測量,從而為工業生產和質量管理提供可靠的支持。 首我們使用結構相似性指數(SSIM)是一種用於評估兩幅2D圖像之間相似度的指標,它不僅考慮了亮度的相似性,還考慮了對比度和結構的相似性。SSIM是一種全局性指標,它通常被認為比傳統的均方誤差(MSE)和峰值信噪比(PSNR)更能準確地反映人類主觀感知。 SSIM的理論背景可以通過以下三個關鍵概念來解釋: 綜合以上三個方面,SSIM結合了亮度、對比度和結構的相似性來計算兩幅圖像之間的相似度。SSIM的範圍是從-1到1,其中1表示完美相似性,0表示無相似性,-1表示完全不相似。因此,較高的SSIM值意味著兩幅圖像越相似。 2D實驗影像1: SSIM = 0.40 2D實驗影像2: SSIM = 0.46 接下來我們將Depth from Focus(DFF)是一項用於從圖像中獲取深度信息的技術來進行實驗。它基於光學焦點原理,利用圖像中不同部分的清晰度來推斷物體的深度信息。以下是有關Depth from Focus的基本概念: 焦點原理:在光學中,焦點是光線匯聚的點,是圖像的清晰部分。當物體與鏡頭的距離不同時,其在圖像中的焦點位置也會不同。 Depth from …