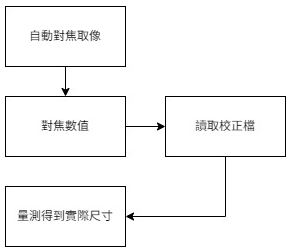
光學校正:
光學校正的步驟
- 校正片準備: 使用一個已知尺寸和形狀的校正片(如棋盤格、圓點陣列等)。校正片的幾何特徵應該清晰明顯,並且材質應避免反光。
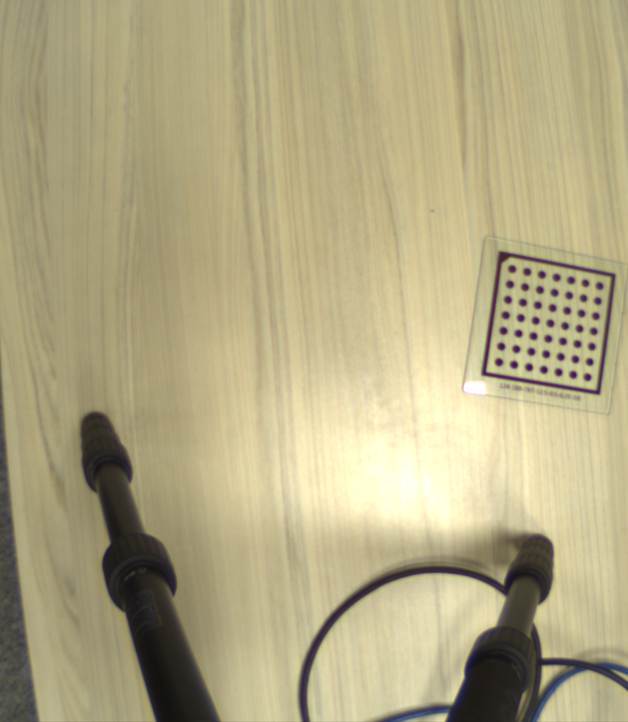
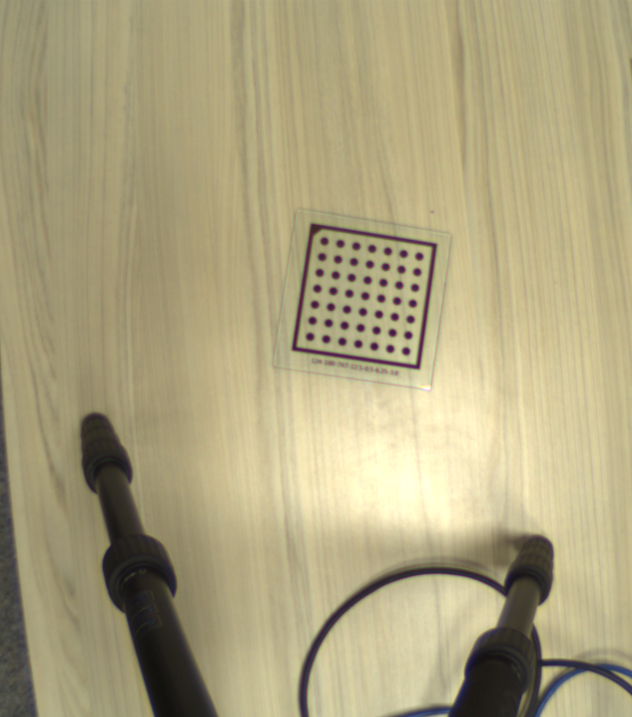
- 拍攝校正片: 使用待校正的相機系統拍攝多張不同角度的校正片照片。確保校正片的整個區域都覆蓋在相機視野內,並從不同角度和距離進行拍攝,以獲取多樣化的校正圖像。
- 圖像處理: 將拍攝到的校正片照片導入圖像處理軟件(如OpenCV),自動或手動標記出校正片上的特徵點(如棋盤格的角點或圓點的中心)。
- 計算校正參數: 使用軟件進行內部和外部參數的校正。內部參數包括焦距、主點、畸變參數等,外部參數包括旋轉和平移矩陣。
- 應用校正參數: 使用計算出的校正參數來修正相機拍攝的所有圖像,以消除鏡頭的失真和其他光學偏差。
尺寸量測的步驟
- 修正圖像: 應用光學校正參數來校正實際拍攝的圖像。
- 標定參考物尺寸: 根據校正圖像中已知尺寸的物體或標記物,設定比例尺,這樣可以將圖像中的像素距離轉換為實際距離。
- 進行量測: 利用標定好的比例尺來量測圖像中物體的尺寸,計算長度、面積、角度等。
- 誤差檢查與修正: 檢查量測結果是否符合實際要求,必要時進行誤差修正。
關鍵元件:
- 自動對焦相機
- 光學校正片
- 筆記本長:21公分;寬:15公分
| NO | 規格 | 相片 |
| 1 | UI-3884LEResolution:6.41 MPixOptical class:1/1.8″Pixel size:2.40 µm |  |
| 2 | 6mm FL, Liquid Lens M12 LensFocal Length FL (mm): 6.0mm |  |
| 3 | 校正片7×7 12.5mm |  |
| 4 | 筆記本21 cm X 15 cm |  |
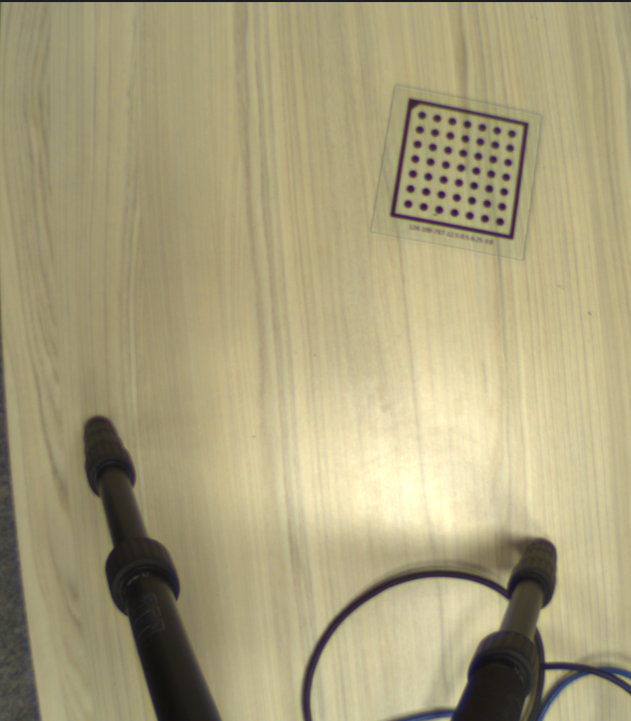
拍攝校正片
 |  |  |
 |  |  |
 |  |  |
| 相機內參矩陣 | [[2234.9151650412764, 0.0, 1613.33369580123], [0.0, 2245.021094475966, 1096.3297700427615], [0.0, 0.0, 1.0]] |
| 畸變係數 | [[-0.27468132182099425, 0.19905562857571302, -0.002831944837372181, -0.01046052609357293, -0.1759195932009981]] |
| 旋轉向量 | [[-0.01961335538368109], [-0.064561685464345], [-0.048599163141283534]] |
| 平移向量 | [[-245.4462037894694], [-234.68707345975994], [589.3447597554461]] |
| 旋轉矩陣 | [[0.9967368360429331, 0.04917594469298315, -0.06401098451575252], [-0.04791040290857523, 0.9986275099612804, 0.02115867769193121], [0.06496362804109107, -0.01802284139878348, 0.9977248639878897]] |
情境一:
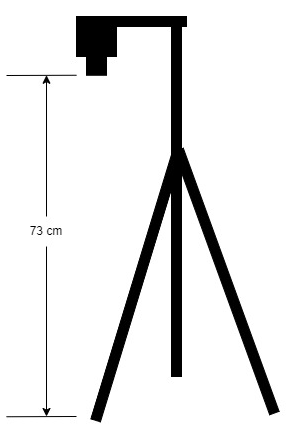
- 自動對焦:焦距數值 54
- 相機與量測的平面距離 73公分
- 拍攝光學校正片
- 計算校正參數:得到相機內參矩陣、旋轉矩陣、平移向量。
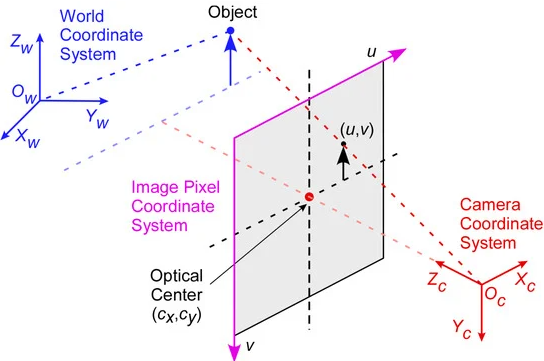
- 相機內參矩陣描述了相機的內部參數,如焦距、光學中心和像素偏斜。它定義了如何將相機坐標系中的三維點映射到影像平面上的二維點。
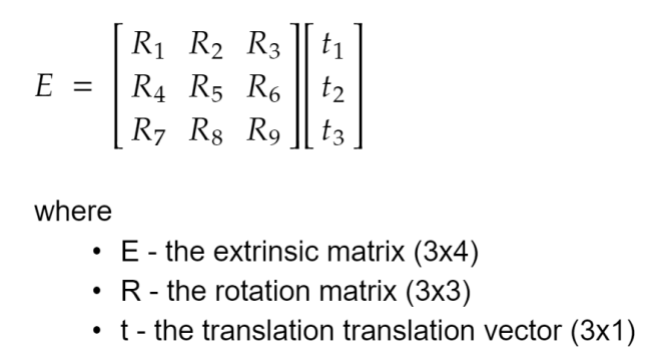
- 旋轉矩陣是一個3×3矩陣,用來描述相機坐標系與世界坐標系之間的旋轉關係。它將世界坐標系中的點旋轉到相機坐標系中。
- 平移向量是一個3×1的向量,用來描述相機坐標系相對於世界坐標系的位移。它將世界坐標系中的點平移到相機坐標系中。
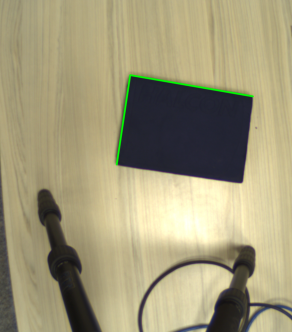
- 標記筆記本的長寬座標點:
- 左上角座標 1327, 479
- 左下角座標1243, 1035
- 右上角座標 2091, 611
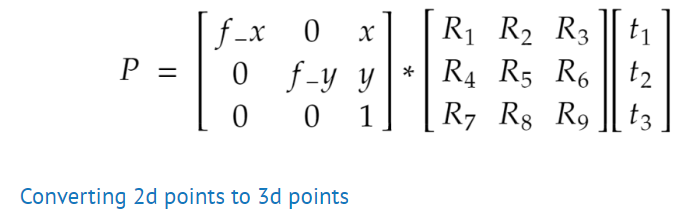
- 將影像座標轉換成實際座標:
- 左上角世界座標:165.4430781105949, 78.0959286673178
- 左下角世界座標:136.3602638761044, 225.29850326645803
- 右上角世界座標:371.385150277364, 120.49460679088405
- 影像量測到筆記本的長、寬:
- 長:210.26123036586773 mm
- 寬:150.04801915524686 mm
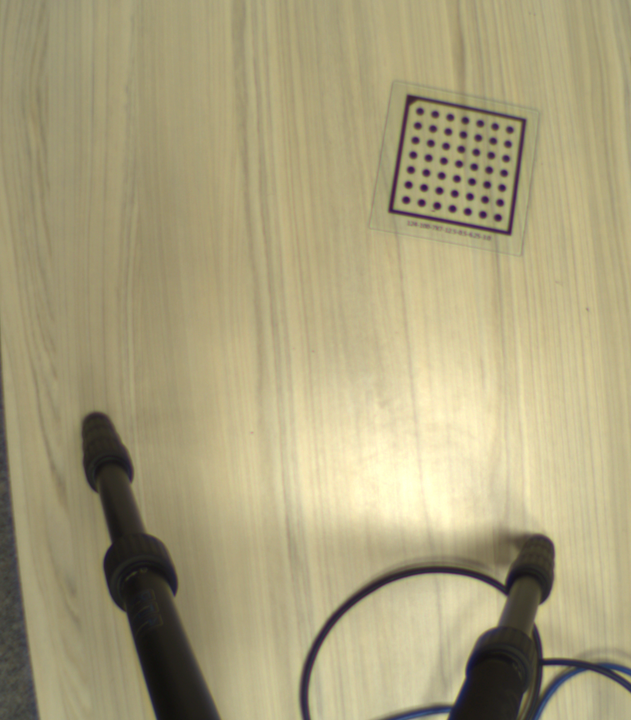
情境一:

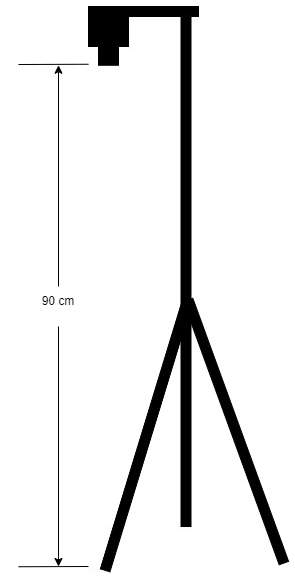
- 自動對焦:焦距數值 42
- 相機與量測的平面距離 90公分
- 拍攝光學校正片
- 計算校正參數:得到相機內參矩陣、旋轉矩陣、平移向量。
- 相機內參矩陣描述了相機的內部參數,如焦距、光學中心和像素偏斜。它定義了如何將相機坐標系中的三維點映射到影像平面上的二維點。
- 旋轉矩陣是一個3×3矩陣,用來描述相機坐標系與世界坐標系之間的旋轉關係。它將世界坐標系中的點旋轉到相機坐標系中。
- 平移向量是一個3×1的向量,用來描述相機坐標系相對於世界坐標系的位移。它將世界坐標系中的點平移到相機坐標系中。
- 標記筆記本的長寬座標點:
- 左上角座標 1060, 450
- 左下角座標1042, 914
- 右上角座標 1712, 473
- 將影像座標轉換成實際座標:
- 左上角世界座標:95.74517669315097,116.92161043618675
- 左下角世界座標:97.79422061504047, 265.3536817958457
- 右上角世界座標:305.8426560794244, 109.68540108000529
- 影像量測到筆記本的長、寬:
- 長:210.22205776348036 mm
- 寬:148.4462137917728 mm
量測邏輯實作(A):
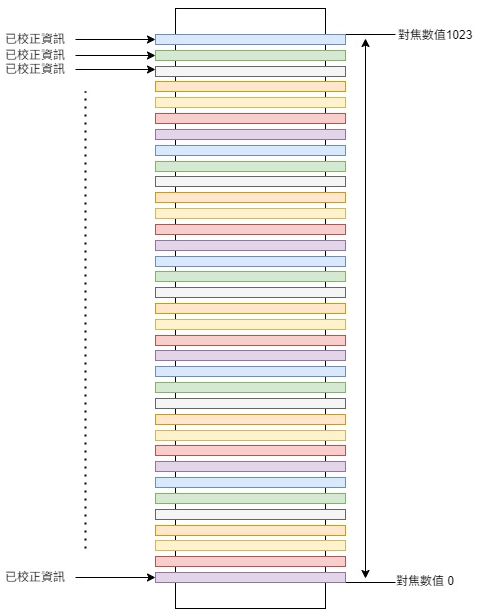
不同高度,不同的葉子堆疊個數(B):
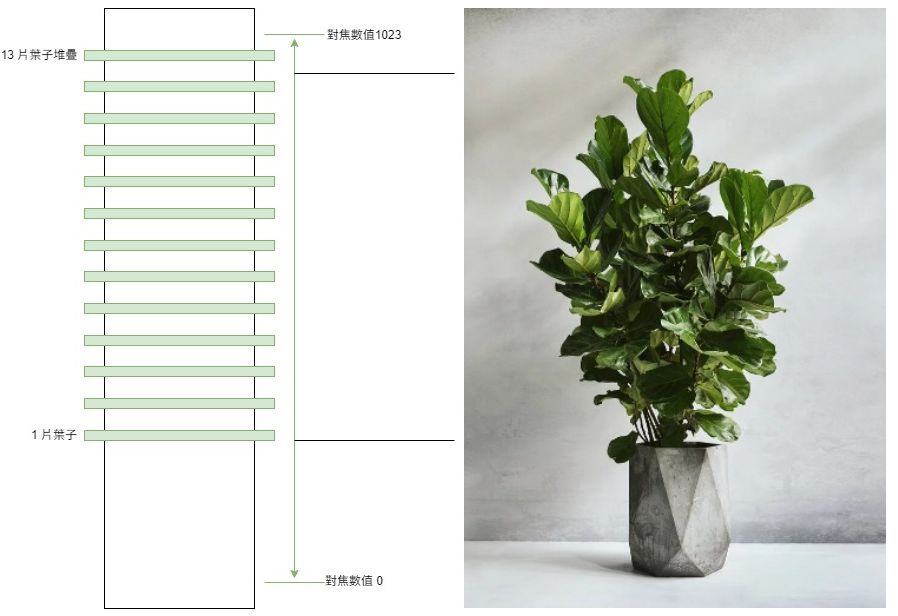
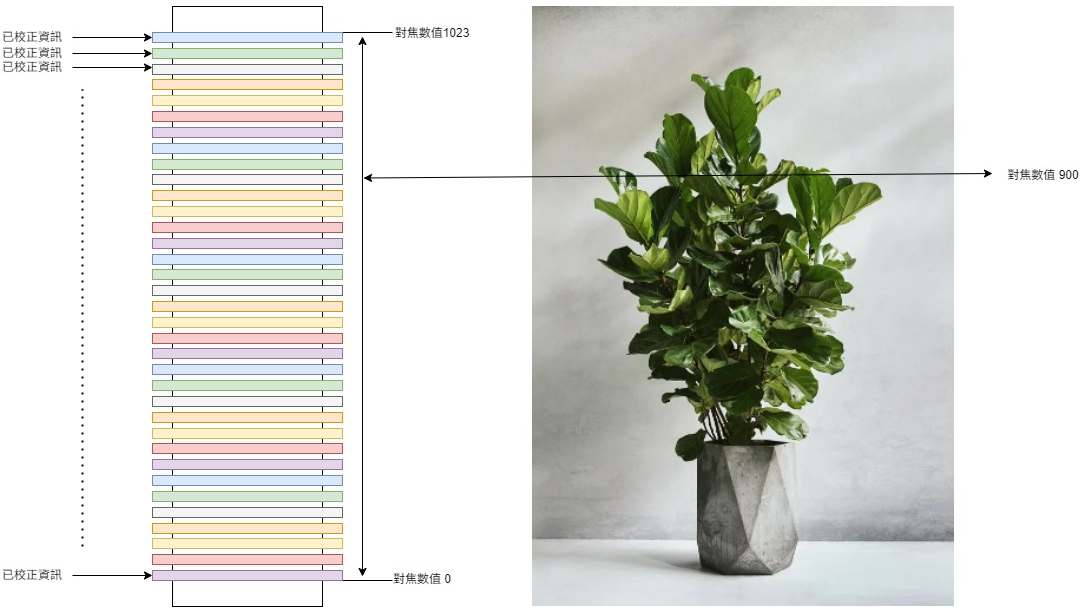
A 所得到的葉面積 X B 依距對焦數值來決定葉子堆疊的倍率= C 得到預估的葉面積
假設: A 的數值為 100,B的數值為10 故預估的葉面積為100 X 10 = 1000
系統會提供一個實際調校功能,當使用者判斷實際面積為 800時,系統會根據800的數值去調校不同對焦數值的倍率。之後會跟據調校後的倍率來計算面積。
每一個拍攝的視野範圍有多個株植栽
目前系統只能以計算出來的總面積來等分有多少植栽